
ODIN – Optimized electric Drivetrain by INtegration (March / April2015)
- Website: http://www.fp7-odin.eu
Overview
One of the primary goals in the development of electric vehicles is to reduce the cost while ensuring performance and meeting automotive quality standards to reach market acceptance. Usually system design of the electric power-train is based on existing components currently in different phases of the development process. Therefore integrating these components into an electric power-train using current designs can only result in a suboptimal solution since components are generally not designed for integration, but rather to optimally fulfil the supplier’s component specific requirements.
The project postulates that the most cost effective and reliable design is a highly integrated solution that reduces interfaces and uses synergy effects e. g. common housing/casing wherever possible. Highly integrated powertrains using high-speed electric motors continue to have a high potential to reduce cost, weight and space (see figure 1).

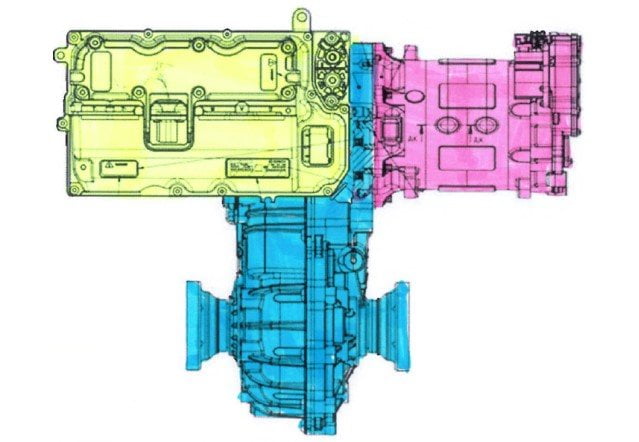
Figure 1: Packaging advantages of an integrated powertrain. Left: Powertrain with Power electronics (Yellow), Gearbox (Blue), Eletric Motor (Pink), right: Integrated Powertrain with reduced packaging.
Thus the goal of the ODIN project is to combine a gearbox with a high-speed electric motor and power electronics in a common housing with an integrated cooling/lubrication circuit to confirm this potential. The components are developed in a common effort specifically for integration to achieve an optimal solution. In addition the framework of a european funded project is beneficial to establish the high degree of cooperation necessary to reach the ambitious project goals.
Consortium
A strong consortium has been formed due to the complementary and interdisciplinary nature of the partners. Thus expert knowledge and experience from different perspectives is available and very valuable in evaluating the various solutions that lead to innovative design decisions. These capabilities encompass the development of vehicles, power-train simulation tools, gearboxes, electric motors, power electronics and castings as well as the lubricants.
Simulation, Powertrain Architecture
The E-power-train system architecture designates where the electric motor and power electronics will be physically located in the gearbox and the gearbox with relation to the vehicle chassis. The “T”-architecture versus the “L”-architecture has been analyzed with the aid of numerical simulation and selected as the best compromise in terms of NVH, complexity and packaging of the complete power-train (figure 2).
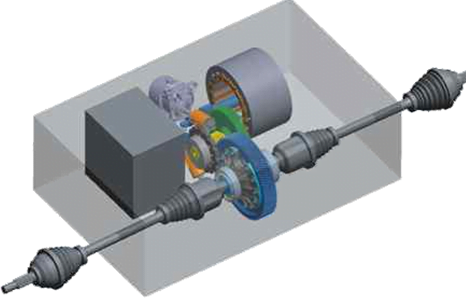
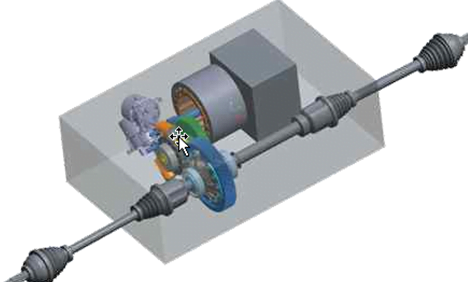
Figure 2: Considered e-powertrain arrangements.
An initial design with a switched reluctance, SR, motor has been created based on the T-architecture.
Power electronics and motor control
Decisions on the power-electronic topology and the rapid-prototyping environment for the development of control algorithms have been made. Existing power modules were used and modified for increased switching frequency applications. The selected control platform offers sufficient flexibility to handle the complex control schemes and meets automotive development standards.
Electric motor
One of the biggest control theory challenges is the control the selected SR motor to avoid exciting certain vibration modes that lead to undesirable noise emitted by the motor at varying operating speeds. Figure 3 shows the two mode shapes (left: mode 0; middle: mode 6) which are expected to be dominant for the selected 18/12 motor configuration. It is planned to use a combination of control strategies to handle specific challenges that vary depending on the rotational speed. This will be Direct Instantaneous Force Control (DIFC) in the medium speed range to overcome the mode-0 related acoustic problem; Direct Instantaneous Torque Control (DITC) will be used at low speed to prevent drive-train oscillations and unpleasant vibro-acoustic response of the gear box.

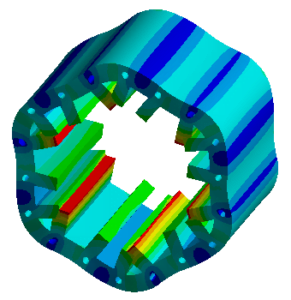
Figure 3: Two dominant mode shapes (mode 0 and 6) of the selected switched reluctance motor
First steps in ODIN were building up the first e-drive and gearbox prototypes. These have been tested and analyzed in order to characterize the behavior and performance of these prototypes. At the same time the design of the e-powertrain prototypes has begun.
Cooling/Lubrication Circuit
The main target within the design of the ODIN fluid system is to combine lubrication and cooling of the system components within only one integrated circuit and using only one fluid. Thus the ODIN fluid has to be multi-talented in view of all the broad responsibilities and duties. It has to reduce friction losses and avoid wear as well as transporting heat. Thus the technical requirements are dependent on a great number of concomitant factors of different operating conditions at or within the different components of the system. A well-designed lubricant specifically developed for this application can have a significant impact on overall system design and operation. Increasing the capability to transport heat can lead to a more efficient cooling circuit and thus have a direct impact on the overall system efficiency. The fact that the lubricant can be developed simultaneously as a key component of the ODIN system is a unique and innovative advantage of the project.
Gearboxes
Significant progress has been made in the area of gearbox, e-powertrain design and implementation. The feasibility of an integrated cooling and lubrication circuit has been proved. Advanced engineering simulation work has been successfully used to optimize the housing design especially in area of vibration reduction.
Vehicle
Renault Zoe will be used to demonstrate the powertrain’s performance in the vehicle (figure 4).

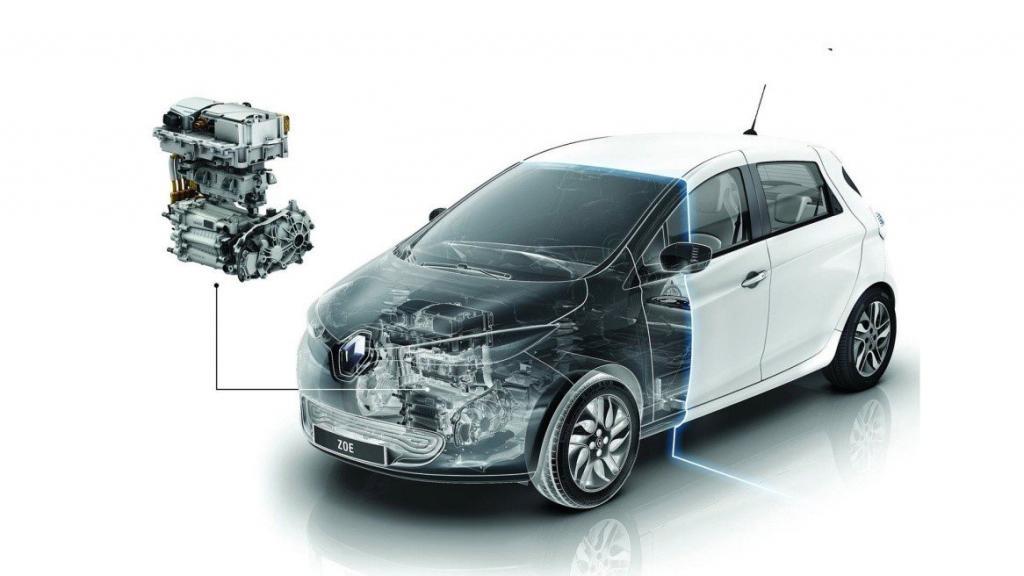
Renault photography, copyright: Pagecran
Figure 4: Renault Zoe will be used as a vehicle demonstrator.
Preparations for the integration into the vehicle have begun. Suitable vehicle software architecture has been developed along with the required preparation of the hardware interface. Finally the mechanical architecture of the vehicle has been designed to incorporate the current integrated system solution.
Project partners
Robert Bosch GmbH
CIE Automotive
GKN Driveline
RWTH Aachen (ISEA)
ROMAX Technology Ltd
Fuchs Petrolub SE
Renault
Website
Other Projects

Position Paper: The URBANIZED vision for commercial vehicles for future urban logistics
In order to be truly sustainable, logistics should be zero-emission, safe for everyone, and have a low impact on urban space while meeting the needs of citizens and businesses. However, current urban...
Read more
Exploring the potential of smart charging for electric vehicles in Germany
This study, led by Qwello, evaluates the USER-CHI SMAC solution based on German market specifications, user behaviours, and use cases. It explores how smart charging strategies can optimise electric v...
Read more